Die Inversion einer komplexen Größe erfordert die Bildung des Kehrwertes
 | (17.5.1) |
→ Bei bekannter Ortskurve Z ergibt sich die Ortskurve des Kehrwertes Y = 1∕Z durch Inversion der bekannten Ortskurve.
Hilfreiche Konstruktionsregeln sind:
- Die Inversion einer Geraden durch den Nullpunkt ergibt wieder eine Gerade durch den Nullpunkt.
- Die Inversion eines Kreises nicht durch den Nullpunkt ergibt wieder einen Kreis nicht durch den Nullpunkt.
- Die Inversion einer Geraden nicht durch den Nullpunkt ergibt einen Kreis durch den Nullpunkt — und umgekehrt.
In Abb. 17.4.1 aus dem letzten Abschnitt sind zwei inverse Ortskurven entsprechend Regel 3 dargestellt.
Grafische Konstruktion einfacher Ortskurven aufgrund der Berechnung von max. 3 Punkten!
Die allgemeine Form der parametrisierten Ortskurve hat die Form einer Geradengleichung
 | (17.5.2) |
Der Kehrwert, also die entsprechende Admittanz, bedeutet die Inversion der sogenannten Nennergeraden (G steht im Nenner), die zu einem Kreis durch den Nullpunkt führt
 | (17.5.3) |
Die konjugiert komplexen Zeiger A∗ und B∗ ermöglichen das Zeichnen des Kreises. Die an der reellen Achse gespiegelte Nennergerade
 | (17.5.4) |
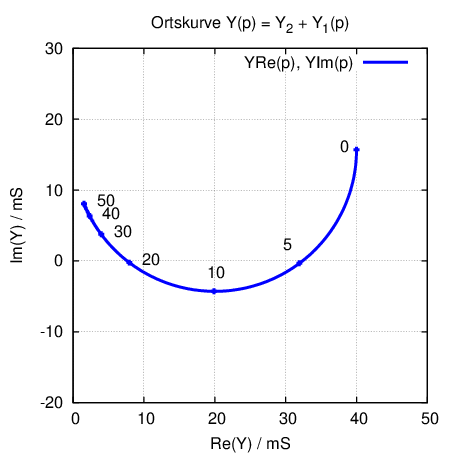
In Abb. 17.5.1 ist die Konstruktion und die Ermittlung der Parameterwerte der Ortskurve eines Kreises durch den Nullpunkt dargestellt.
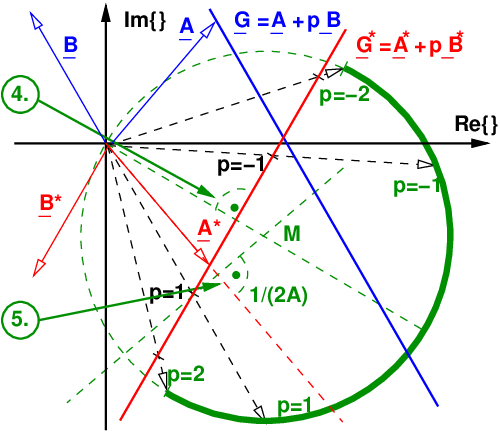
Es empfiehlt sich folgendes schematisierte Vorgehen:
- Das Zeichnen der Nennergeraden

wird meistens nicht explizit ausgeführt, da die gespiegelte Nennergerade direkt berechnet werden kann.
- Wahl der Achsen für die (an der rellen Achse) gespiegelte
Nennergerade

für G∗(p min) und G∗(p max) mit gleichem Maßstab für die x- und y-Achse.
- Zeichnen der gespiegelten Nennergerade, deren lineare Parameterwerte die Parameter des späteren Kreises sind.
- Zeichnen der Senkrechten auf der gespiegelten Nennergeraden G∗, die durch den Nullpunkt läuft.
- Berechnen des Abstandes

und Festlegen des Maßstabs für den Kreis, z.B. auf einem analogen Raster zum Maßstab der gespiegelten Nennergeraden.
Zeichnen der Senkrechten auf A∗ im Abstand A K∕2.
- Die Schnittpunkte der beiden Senkrechten ergeben den Mittelpunkt M des Kreises. Zeichnen des Kreises und Markieren des Kreissegmentes entsprechend der gespiegelten Nennergeraden.
- Beziffern des Kreises mit den Parameterwerten p entsprechend der gespiegelten Nennergeraden G∗ indem vom Nullpunkt des Koordinatensystems aus Geraden durch die bekannten Parameterwerte der gespiegelten Nennergeraden gezeichnet werden.