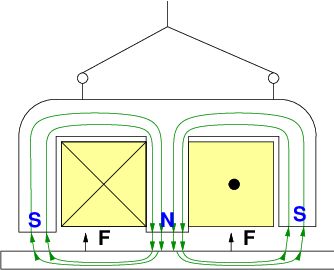
Zwischen dem Pol in der Mitte und dem Rand des Lasthebemagneten in Abb.12.9.1 wird durch den Spulenstrom ein starkes inhomogenes Magnetfeld erzeugt, welches Kräfte auf Eisenteile ausübt.
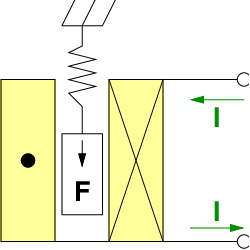
Der Strom erzeugt ein zentrales Magnetfeld, welches einen Tauchanker gegen eine Feder bewegt. Mit dem Prinzip in Abb.12.9.2 können bei verfahrenstechnischen Steuerungen Magnetventile für strömende Flüssigkeiten betätigt werden.
Durch die Spule wird der Steuerstrom IS geleitet, so dass der Anker A angezogen wird. Dadurch wird die bewegliche Kontaktzunge, die mit dem Kontakt 3 verbunden ist von Kontakt 1 nach Kontakt 2 bewegt, wie in Abb.12.9.3 zu sehen ist .
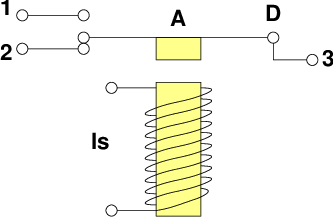
→ Vorteil: Galvanische Trennung von Steuerkreis und Arbeitskreis. Ist mit elektronischen Schaltungen (Transistoren) nicht zu erreichen.
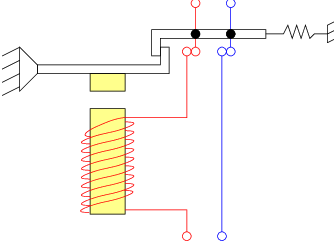
Wird eine bestimmte Stromstärke überschritten, so wird der Anker des Überstromschalters in Abb.12.9.4 angezogen, die Schaltklinke wird freigegeben und bewegt den doppelpoligen Schalter in die Aus-Stellung. Einsatz als automatische Sicherung.
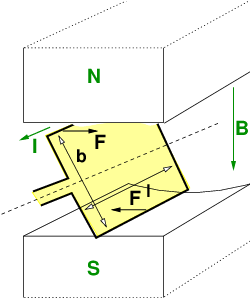
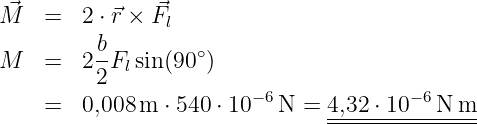
Eine rechteckige Drahtschleife in einem homogenen Magnetfeld drehbar angeordnet ergibt ein Drehspulmesswerk wie in Abb.12.9.5 dargestellt . Fließt ein Strom durch die Drahtschleife, so entsteht eine Lorentzkraft FL und in Verbindung mit der Breite b der Drahtschleife ein Drehmoment M.
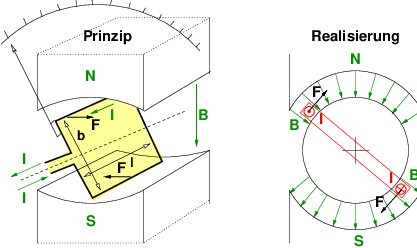
→ Durch den feststehender runden Eisenkern entsteht ein radial homogenes Magnetfeld (Richtung der Lorentkraft!)
siehe Abb.12.9.6 Der Gleichstrommotor ist grundsätzlich genauso aufgebaut wie das Messwerk, nur muss beim Motor die einmal eingeschlagene Drehrichtung beibehalten werden . Der Strom muss dazu ständig in die obere Windung hinein- und aus der unteren heraus fließen. Die Umkehr der Stromrichtung wird durch mit rotierende Kontaktbleche erreicht (Stromwender).